
In domo / Nuntium / News industria / What Motors are used in AGV Systems and How Do you choose the Right AGV Drive Motor?

 LENTITUDO
LENTITUDO
Applicationem industria
AGV
Automated Robots

laser secans

Logistics Sorting

Photovoltaic Power-Station

Medicinae cogitationes
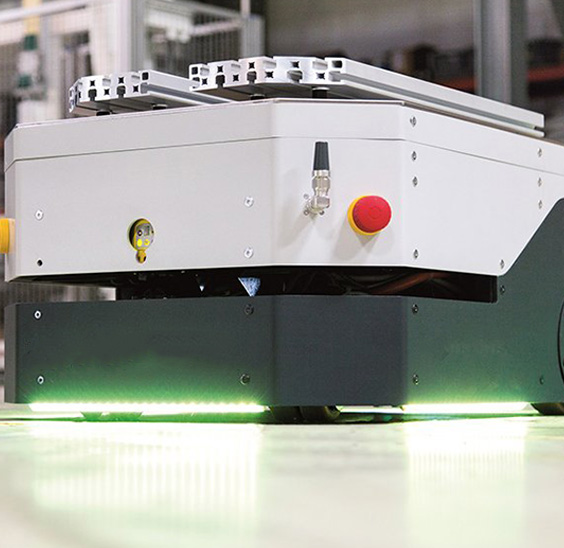
What Motors are used in AGV Systems and How Do you choose the Right AGV Drive Motor?
Motor coegi est maxime criticum componente electromechanicum in Vehiculum autonomo ductu (AGV). Determinat quomodo AGV accelerat, quam praecise se ponit, quantum payload movere potest, quousque pugna eius inter crimina durat, et quousque vehiculum operatur antequam ratio activitatis sustentationem requirit. AGV cum motore underpowered vel male specificato non potest occurrere eius payload et celeritati requisita in productione; una cum efficientia pauperum motoria citius haurit altilium quam operatio logistics accommodare potest; una cum motore motore frequentem sustentationem requirens tempus inconditum efficit in systemate cuius integra propositio valoris est certa, continua operatio sui iuris.
Nam AGV systematis integratores, machinatores robotici designantes coeuntes componentes, horrea automationis iunctiones aestimantes, AGV suggestas, et OEM instrumentorum tincidunt novas AGV vehicula designantes, technologias motorias intellegentes adhibitas in AGV systemata coegi — ac parametri specificationem quae technologiae aptat quae applicatio determinant — essentialis est cognitio ad rectas decisiones componendas. Hic dux operit AGV genera motoria, parametros delectus, et requisita specifica quae applicationes motorum AGV distinguunt ab applicationibus motoriis industrialibus generalibus.
Cur AGV Coegi Motor Requisita diversae sunt a Generali Industrial Motor Requisita
AGV motores motores agunt in statuto exigendo et distinctivo condiciones quae eas ab applicationibus motoriis maxime generalibus separant;
Pugna virtutis copia. Omnes AGVs pugnae potentes sunt — operantur ex fasciculo DC altilium (typice 24V, 36V, vel 48V nominali) sine nexu cum potentia AC mains. Hoc fundamentaliter motores coegi DC-compatible requirit. AC motores cum inverters velatorio adhiberi possunt, sed efficientia poena DC-ad-AC inversionis in systematis pugnae powered significans est. Motorum DC - motores praecipue BLDC - electionem dominantium sunt quia potestatem altilium directe (vel per DC-DC converter) sine poena inversione accipiunt.
Satus crebros-statur circuitus. AGVs e quiete ad celeritatem peregrinandi accelera, navigare ad punctum depositum vel vagum, et desine — identidem centies vel millies per diem. Coegi motori hunc cyclum initium statismi tractare debet sine aestuatione vel nimia gestione, quae loca in administratione scelerisque motoris postulat et, pro motoribus iniectis, conventus commutator et peniculus, qui vagorum inceptio venas summus tractat, tractat.
Operatio bidirectional. AGVs et ante et retro agere debet — ac transeundum inter directiones pure sine ictu mechanica debet. Motricium et eius moderatorem celeritatem bidirectionalem lenis sustinere debet. Ad gubernationem differentialem AGVs (ubi celeritas rotarum independentium a dextra potestate sinistra et dextrorsum versationem creat), motores activitates duo praecise pares esse debent in responsionis velocitate torques pro accurate gubernando.
Certa celeritate ac dignitate moderari. Navigatio accuratio in recentioribus AGVs — praesertim laser-ductus (LIDAR), visio-ductus, vel semita magnetica AGVs — celeritas subtilis imperium requirit et, in quibusdam systematibus, certae positionis opiniones a motore encoder agitante. Motor motoriis constans operari debet, celeritatum suarum payload et locorum discursum moderata sine velocitate venationis vel instabilitatis.
High efficientiae se refiere a. In pugna autocineto autocineto autocineto, efficientia motoria directe determinat tempus operandi inter crimina. A coegi ratio motoris operandi ad 85% efficientiam potius quam 75% extensio vehiculum operandi per circiter 13%, quod in applicatione logistics potest esse differentia inter vehiculum suum iter complens intra cyclum altilium et sistendi crimen requirens sine clausura. Energy efficientia est exigentia specificationis primae classis in electione motoria AGV, non post considerationem.
Pelagus Motor Genera in AGV Coegi Systems
Brushless DC Apparatus Motors (BLDC): Dominant AGV Drive Technology
Brushless DC motores calces sunt valde malle malle technologiam motoriam pro modernis systematibus AGV. Motricium BLDC substituit commutatorem mechanicum et conventum decutiat traditam DC motore cum commutatione electronico - motore moderatorem locum rotoris legit (per Hall effectum sensoriis vel encoder feedback) et ambages statoram in recta serie ad conservandum rotationem sine ullo contactu corporis penicillo. Haec commutatio electronica est quae motores BLDC definitas utilitates dat super motores in contextu AGV:
Nulla peniculus gerunt = non peniculus sustentationem. In scopis DC motoriis, perterget carbonis contra commutatorem annulos premens in operatione continenter gerunt. Ad altum officium cycli - AGVs operans 20 horas per diem in tribus mutationibus logisticorum operationum — intervalla postea penicillo intra menses attingi possunt, horarium temporis ac laboris substitutum exigentes. BLDC motores nullas setis gestare; Sola elementa gerunt gestus motorios sunt, qui vitam habent servitium in milibus horarum mensuratum. Classis AGV continenter operans, penicillo sustentationem eliminans est summus sumptus operativus et utilitas uptime.
Superioris efficientia. BLDC motores typice assequuntur 90-95% electrica-ad-mechanicam efficientiam eorum ad punctum operativum aestimatum, comparatum 75-85% ad instar motorum DC reicientium. In a altilium-powered AGV, haec differentia efficientiae directe vertit ad tempus per crimen cycli laborantis.
Melior scelerisque consequat. BLDC calor motoria generatur principaliter in anfractibus statorum, quae sunt in directo contactu cum habitationi motoriae, dissipationem efficiens calorem faciens. Motores defricti calorem generant in ambagibus et in punctum contactum commutatoris/scutientis, et punctum contactus peniculus in interiore motoris est, ubi dissipatio caloris minus efficax est. BLDC motores superiores cyclos continuum officium sustinent sine overheating.
Certa celeritate imperium. Electronic commutatio cum encoder seu Hallis sensoriis ope stricta celeritatis ansa clausa potestate per latitudinem operandi latitudinem dat. AGV navigationis algorithms ab accurata rotae velocitate opiniones pendent pro positio mortua computandi aestimatio inter positiones absolutas fixas — motores BLDC cum encoder opiniones hanc accurate fideliter liberant.
Peniculus Motors DC Apparatus: Sumptus-effective ad inferioris-Officium AGV Applications
Motorum DC calces in usu manent in applicationibus AGV ubi cyclus operativus est inferior (non continua 24/7 operatio), ubi requisita payload modesta sunt, et ubi sumptus motoris inferior est prioritas in suggestis costis-sensitiva AGV. In AGVs logisticis internis ad levem officium destinatis — parvae partes onerariae, documenti partus, fulcimentum lineae fabricandae — simplicior moderatio electronicorum requiritur a motoribus DC retis (nulla commutatio moderatoris necessaria) et eorum inferioris unitatis sumptus suam electionem in BLDC optio excusare possunt, quamvis postulationem penicilli sustentationem.
Motorum DC motorum iniectis etiam torques inchoationis altissimas praebent — altiores quam motorem aequalem BLDC in quibusdam consiliis — quae utiles esse possunt AGVs ab onere in inclinationes incipientes. Autem, moderni BLDC moderatores motoris altum hoc initium torques agendi possunt replicare per strategies campi ordinatum imperium, reducendo commodum historicum motoris in hac provincia.
Apparatus Planetarius Motors AGV Drive Currus
Neglegens utrum elementum motore DC obstrictum sit, AGV rotae agendae fere universaliter utuntur instrumentis planetariis reductione inter motorem et rotam. Configuratio calces planetarium est praeferendum genus gearbox ad applicationes AGV pluribus de causis:
Anni planetae summam torquem densitatem praebent - output torques supremi pro data gearbox diametri exterioris - quod est criticum in agV rotarum conventibus ubi unitas rotae motoricae integrae aptare debet intra stricta dimensiones angustias in gb vehiculi. Coaxial input/output alignment machinae calces planetariae sino conventum inlineatum: mobile → gearbox → rotae planetariae, omnes in unum axem, sine cinguli stimulo calces seu vermis reductionis.
Gearboxes planetae etiam altam efficientiam (92-97% per scaenam praebent) comparata ad utrumque calces vermes (typice 50-85% secundum rationem et angulum plumbeum), quod est maximus in applicatione altilium-efficientiae criticae AGV. Vermis calces AGV agitant currendo motore ad 70% gearbox efficientiam efficientiam amittit 30% energiae electricae motoris initus ad calefactionem in sola gearbox - poenam ingratam pro vehiculo pugnae powered.
Clavis Specification Morbi pro AGV Coegi Motor Electio
| Parameter | Typical AGV Specification Range | Quid refert |
|---|---|---|
| Rated voltage | 24V/36V/48V DC | Oportet inserere AGV altilium sarcina intentione; superior intentione permittit potentiam superiorem in currenti inferiore, funes reducendo damna et temperatura motoriam |
| Aestimavit potestatem | 50W - 1,000W per coegi motricium (fretus vehiculorum payload) | Sufficere debet ad accelerandum vehiculum onustum in altissimo gradu in ambitu operante; underpowering causas motricium scelerisque cultro in inclinat |
| Celeritas ad output rotam | 50-300 RPM (sagitta rota, post calces reductionem) | Vehiculum iter celeritatem decernit; rotae diametri et scopum AGV celeritas definita output spiculum RPM quaesitum et propterea calces ratio inquisita |
| Continua output torque | 5-200 Nm per coegi motricium (fretus payload et inclina) | Excedere debet torques, qui AGV in gradu maximo ad celeritatem aestimatam movendum requiritur; applicare II "salutem factor in inpulsa onus margine) |
| Apicem torques | 2×-3× continuus torques | Requiritur ad accelerationem a frenis sub onere pleno; motor et moderatoris sustentare debet apicem torques pro duratione accelerationis aggerem sine overheating vel excitato overcurrent protection |
| Encoder resolutio | 100-4096 PPR (pulsus per revolutionem at motor harundo) | Odometriam accurate determinat de navigatione mortua; altior encoder resolutio melioris positionis æstimationem inter absolutam positione constituit sensoriis navigationis |
| Efficientia | ≥ LXXXV% altiore (motor gearbox) ad rated punctum operating | Directe determinat pugna operating tempus; BLDC planetarium attingit 90% efficientiam coniunctam; Malo calces lianc Hibera vermis (60-70% combined) |
| IP rating | IP54 minimum pro logisticis indoticis generalibus; IP65 in humido vel pulverulento ambitus | AGV motores pavimento contaminantium exponuntur; insufficiens tutela ingressa praematura fert defectum e pulvere et umore flexuoso |
| Officium cyclum | S1 continuae operationes 24/7; S 3 intermittendi pro uno-subcinctus | Motor scelerisque rating exemplaris operational aequare debet; motor æstimabitur S3 intermittendi officium in continua S1 AGV applicationes |
Quomodo computare required AGV Coegi Motor Torque
Aureus in superficie plani requiritur ut agV pellat celeritatem volvens resistentiam superare debet; in inclinatione, gravitas resistentiae gradus addit componentes. Calculum pro more duorum rotarum-agitatorum AGV;
Totalis pondus vehiculum: W = (AGV tare pondus maximum payload) × g [Newtons]
Repugnantia vi volvens; F_rolling = W × μ_r, ubi μ_r est resistentia volubilis coefficientis (typice 0.01-0.02 pro rotae Flexilis concreto laevi; 0.02-0.05 pro areis mollibus vel superficiebus asperis)
vi gradus resistendi (for inclines); F_gradum = W sin(θ), ubi θ est angulus gradus (ad 5% gradus, θ ≈ 2.86°, sin(θ) ≈ 0.05).
Summa vis coegi: F_total = F_rolling F_grade
Aureus requiritur ad rota coegi (per motor, si duo motores coegi); T_wheel = (F_total / 2) r_wheel, ubi r_wheel est rota coegi radii in metris
Requiritur motor torque: T_motor = T_wheel / (i η), ubi i est ratio reductionis calces, et η est efficientia gearbox
Exempli gratia, AGV cum 500 kg ponderis onusto summa, 150mm diametri rotarum agitantium, in 3% gradu, cum 25:1 planetarium gearbox ad 0,95 efficientiam;
- W = 500 × 9.81 = 4,905 N
- F_rolling = 4,905 0.015 = 73.6 N
- F_grade = 4,905 0.03 = 147.2 N
- F_total = 220.8 N; per motor = 110.4 N
- T_wheel = 110.4 0.075 = 8.28 Nm
- T_motor = 8.28 / (25 0.95) = 0.35 Nm aestimavit torques continuos
Adde 2× salus factor pro acceleratione torque: apicem motor torque postulationem ≈ 0.70 Nm. A BLDC calces planetarius motor cum ≥ 0.70 Nm torques apicem in 48V cum 25:1 huic exigenti occurrit ratio. continuus torveus rating verificari debet contra continuum torquem requisitum (0.35 Nm in pleno payload gradu) cum margine scelerisque congruenti.
Frequenter Interrogata
Quomodo gubernatio schematismi AGV electionem motoriam afficit?
AGVs pluribus configurationibus gubernantibus utuntur, singulis cum diversis requisitis motoriis. Coegi differentialis (duae rotae autocinetae independentiae, non rotae gubernatricis) vices facit currendo duos motores in diversis velocitatibus currendo - hoc utrumque motores requirit ut in notis suis velocitatis torques arcte pares sint et ab coordinato motore agitatori moderato, qui velocitatem differentialem in utraque rotis simul imperare potest. Tricyclus gubernans (unus rotae anterius ductae, duae posteriores rotae passivae) uno agitando utitur cum actuatore separato - electio motoria directa est, sed integratio actus gubernandi considerari debet. Omnidirectionales agitationes (mecanum vel rotarum omnium in singulis angulis) quattuor motoribus singillatim moderatis utuntur et motum lateralem et diagonalem admittunt — moderatores motoris coordinationem quattuor canali tractare debent, et motores optimam celeritatem congruentes notas habere per range operantem.
Quod genus encoder commendatur pro motoribus AGV coegi?
Incrementales encoders (quadraturae A/B output) frequentissimae sunt odometriae motoriae AGV coegi - pulsum comitem per revolutionem praebent quod gubernator navigationis conversis ad spatium rotae et velocitatis spatium. Encoders absoluti nonnunquam adhibentur in applicationibus moderatoris ad cognoscendum statum sine homing potentiae, sed odometriae (distantiae mensurae), encoders incrementales normae sunt. Resolutio 500-1000 PPR in scapo motorio est typice sufficiens ad bonam odometriam accurationem cum rationibus reductionis calces planetarum vexillum. Superior resolutio (2000-4096 PPR) melioris odometriae in systematis humilitatis ratione ubi rota scapus maiorem fractionem revolutionis per motorem revolutionis movet.
Potest AGV coegi motores ad usum braking regenerativi?
Ita - BLDC moderatores motores in applicationibus AGV in usu braking regenerativos typice sustinent, ubi motor agens in retardatione agit, energiam convertens in energiam electricam quae altilium redigit. Regenerativus braking reductionem altilium minuit (praesertim in sistendo itinera agV et frequenti eventuum retardatione), debilitatem fractum minuit, et citius retardationem sine calore mechanico fregit. Eneritas recuperandi efficientiam braking regenerativi in applicatione typica AGV est 15-30% energiae adhibitae ad accelerationem, significativa in operationibus brevibus-studiis summus. Facultas regenerativa requirit ut motor moderatoris currentis fluxus bidirectionalis fulciatur et systematis systematis systematis renatis curam currentem recipiat sine ingressu in tutelam.
AGV Coegi Motors a Zhejiang Saiya Vestibulum intelligentis
Zhejiang Saiya Intelligens Vestibulum Co, Ltd. , Deqing, Zhejiang, fabricat BLDC motores calces planetarum, scopa DC motores calces planetarum, et AGV coegi conventus motorum completorum pro autonomi ducti applicationes vehiculum. AGV producti range opercula educunt motores unitates cum encoders integratis ad 24V, 36V, et 48V voltages nominales altilium, in molis magnitudinum ab 32mm ad 82mm diametri, cum rationibus reductionis machinarum planetarum ab 5:1 ad super 500:1, tegumentum payload classes ex levi officio parvae partis onerariis AGVs ad gravia officium materia tractandi suggesta. Consuetudo AGV specificationes motores — voltage, ratio, resolutio encoder, ascendens, IP ratings et connector — praesto sunt per ministerium evolutionis societatis OEM/ODM.
Contact us cum specificationibus tuis AGV - vehiculum pondus, payload, celeritatem maximam, altilium intentionem, rotam diametri, et environment operans - motorem commendationem et quotationem recipere.
Related Products: AGV Project Products | Brushless DC Apparatus Motors | Apparatus Planetarius Motors | Subtilitas Planetaria Gearbox | Peniculus DC Apparatus Motors
Related Products
-

Hoc 6W inductione AC calces motricium est efficiens, pacto et reliable parva motor idoneam ad amplis industriae et familia applications.motor frame 60mm x 60mm faciens facile install in spatio-cons...
See details -

In 6W Peniculus DC GBear motor est disposito ad efficientiam et versatility, idoneam variis applications. Cum pacto frame mole 60mm x 60mm, id convenit seamlessly in stricta spatia. Motricium opera...
See details -

Et 10W Peniculus DC calces motricium praebet princeps perficientur et adaptability, pro range of Industrial et Hobbyist Applications. Cum a frame magnitudinem 60mm x 60mm, hoc motor est ad aptare i...
See details -

Et 24V Brushless calces motricium est versatile et efficient motricium disposito in range of applications. Dimensiones vndique a 60mm x 60mm ad 104mm X 104mm, hoc motricium potest in variis apparat...
See details -

Et 32mm Planetarium calces motricium est a pacto et efficient solutionis disposito variis applications requiring princeps torque et precise imperium. Cum diametro 32mm, hoc motricium est idealiter ...
See details -

Et 42mm penicillo planetarium calces motricium est a versatile et efficiens component late in variis applications requiring precise torque et celeritate imperium. Cum a rated current vndique a 0,7 ...
See details -

In 32mm Brushless planetarium calces motricium est summus perficientur, pacto solutio ratio pro applications requiring efficientiam et reliability. Operating ad rated voltage of 24v et perussi 20w ...
See details -

Et 42mm Brushless planetarium motricium est summus efficientiam motricium uber quod late in variis missionibus postulantes praecisione tradenda. Et rated current huius motricium est 1.3a et rated t...
See details -

Spera She Gearboxes, LABIUM amplitudo range cum XL, LX, LXXX, CXX et CLX exempla, quae disposito ad providere agentibus et robust virtute tradenda solutions. Haec gearboxes pluma per output flange,...
See details -

SPF series sunt cum platea output flanges, accommodando dimensiones a 40mm ad 160mm. Haec flanges sunt machinatum est excellere in variis industriae applications, offering certa perficientur per sp...
See details -

Et 52mm Planetary Apparatus motricium est a pacto et efficient solutio disposito variis applications requiring princeps torque et precise imperium. Cum diameter 52mm, hoc motricium est idealiter id...
See details -

62mm Penicillo planetarum motricium est a versatile et agentibus component late in variis applications requiring precise torque et celeritate imperium. Cum a rated current vndique a 2.5 ad 5.5A, ho...
See details
Contact Details
- TEL: 0086-0571-86951513 / 86951543
- Fax: 0086-571-86040769
- E-mail: [email protected] / [email protected] / [email protected]
- Office: Hangzhou Saiya Transportorum apparatu Co., Ltd
- Office Address: MMCCI locus, Wanyin aedificium, Hangzhou urbem, Zhejiang provincia
- Factory: Zhejiang Saiya intelligentes vestibulum Co., Ltd.
- Factory Address: No.35 aedificium, Zhongnan summus tech Yunhe Zhigu industriae parcum, Xinan villa, deqing Comitatus, Huzhou urbem, Zhejiang, Sina
Productio
Si intrested
In nobis products,
Placere consulere nobis
Copyright © Zhejiang Saiya intelligentes faciens Co., Ltd. All Rights Reserved.
Custom Gear reductionem Motors Suppliers
